Drain X
Bold and Smart design.
The idea was to build a Robust and Intelligent product. The challenge here was to clash highly stable and robust forms with expressive smart and sharp details.

Drain Inspection and Remote sample collection
Environmental maintenance is an essential domain in all urban centers often involving highly manual, tedious, time consuming and dangerous work processes. One of them is maintenance and inspection of different type of drainage systems, which is essential to keep a city healthy. With most of the developed world aging rapidly, people are moving away from these jobs, and pushing more towards productivity and safety.
Manual inspection also poses serious health hazards as it involves covering a long stretch of highly inaccessible areas underground with poor lighting and ventilation and mosquito/insect bites. These practical challenges along with the advancements in robotics and Artificial Intelligence encouraged to build a semi autonomous robotic solution.

Often seen, but hardly observed
What’s under those drain covers and manhole ? Its so common that we never even notice it.
Drainage infrastructures are large network of drain channels running across the urban centers, which help prevent flood by diverting the runoff rainwater/flood, or melted snow off the streets or other excess waters into natural water bodies and water catchments.
Drain Inspection ?
stagnant water check for mosquito breeding
Identify any structural defects inside the drains
Identify any choke in drain channels by debris
Market
Robust and Heavy ——> Relatively lightweight for portability
Demand technical knowledge for operation (require dedicated training before operating)
Fixed to only one type of use case/application

The challenge here was to design this complex and robust robotic system in a way that non-technical users are comfortable handling it during deployment.
Blending Bold and stable forms with smart and sharp aesthetics
Design.
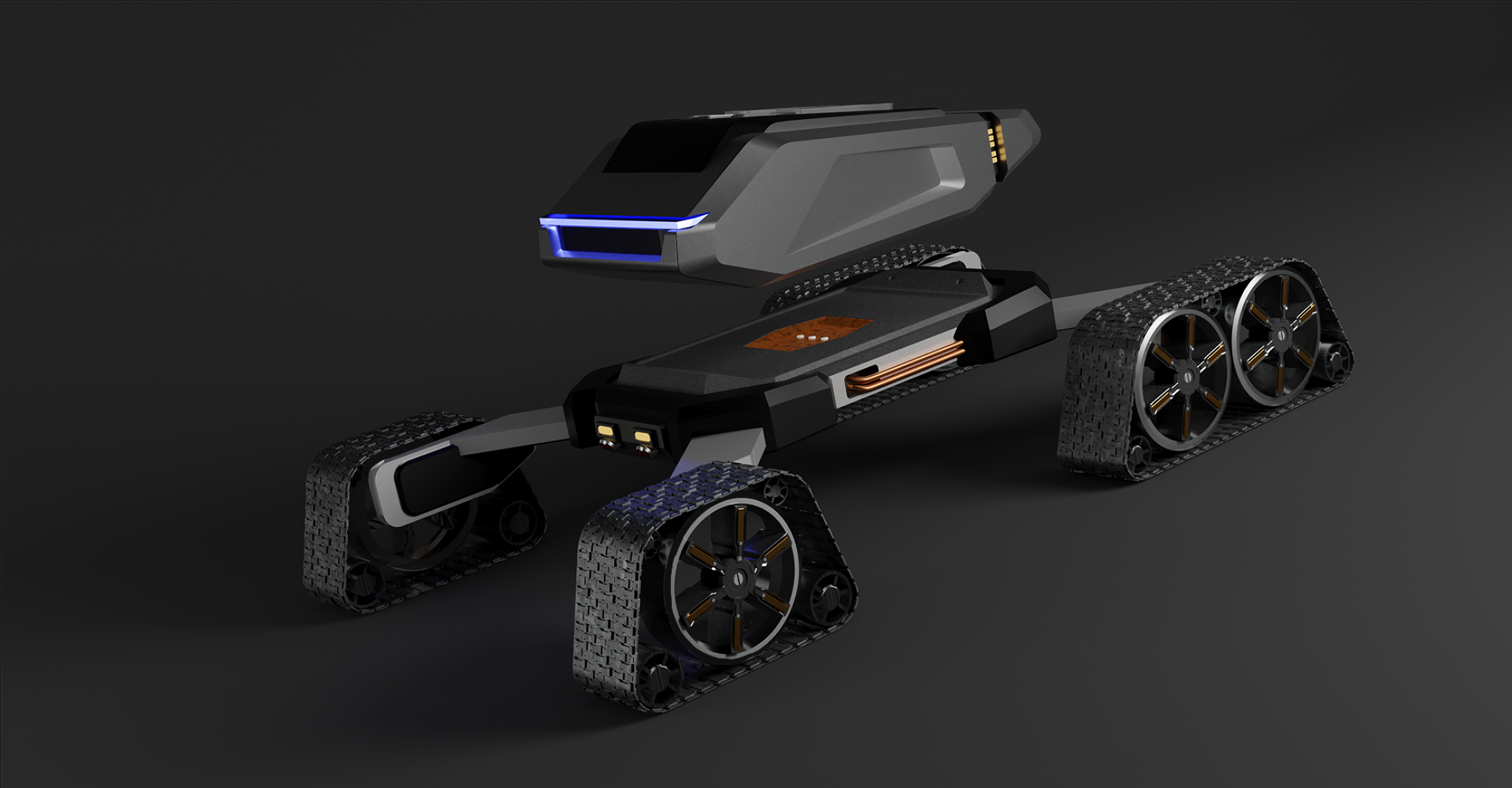
The visual design elements have been carefully chosen to reflect the functional aspects of a smart and robust system. The robot designed to be functionally modular with detachable electronic(top) and locomotive systems(base). The base with four tracks with bearings can reconfigure its widths to adapt itself to different drain sizes. Besides visual inspection, DrainX is also fitted with two modular containers at its back to collect two water samples at any specific location inside drain to check for mosquito breeding.
While maneuvering through the drains, an AI algorithm identifies stagnant water, debris, cracks in drain walls and geo-tags the location for any repair work.




Functionally Modular.
The robot’s functionally modular construction allows it to be easily portable and reduces the setup time. The top portion of the robot(which we call Ebox), hosts all the electronics and control systems. Ebox is magnetically attached to locomotive base.

As World’s first reconfigurable robot for drain inspection, its capable of performing autonomous morphology transformations to overcome the complexities in locomotion inside the underground drains.
Reconfiguration.
Diagonal reconfiguration : In order to cater for the irregularities in drain profiles(in widths and symmetry of the drains), DrainX is designed to reconfigure its width my independently extending and contracting its four tracks.
Independent reconfiguration
Track Locomotion.
The use of continuous caterpillar tracks are most effective in maneuvering through both hard and slippery terrains inside the drains. Four independent tracks increases the contact area to the ground, making it more stable during locomotion.






Sample collection.
DrainX is designed to collect two water samples at any specific location inside the drain. Two vacuum motors suck the water samples from the drain channel and store it in transparent sample collection tubes attached at the back of the robot. This gives the samples a clear visibility and accessibility to the user.

Process.
The project was highly driven by research, thereby gathering the right insights from it. Several rounds of iterations for industrial design and technical design overlapped each other resulting a number of proof of concept prototypes.
Since this is a complex robotic system performing and integrating various mechanical and autonomous functionalities, the approach was to break down the complex system into smaller sub-systems. This helped to focus the research and development(R&D) on each sub-system which will then be integrated together.












Breaking down complex problem statement
Locomotion inside different types of drains
How might we design a locomotion system which can navigate through a large number of drains?
Reconfiguration
How might we design a robot to change its morphology to adapt and maneuver through the irregularities in the drain profile?
Sample collection
How might we collect samples from the drain channels in a simple and energy efficient ways?
Dispensing pesticides
How might we design a system to carry the pesticide payload and dispense it in any specific areas inside the drains?
Deployment and retrieval of the robot into the drain
How might we design a modular deployment and retrieval mechanism which is lightweight and portable?
Artificial intelligence functionality
How might we design an AI to identify cracks on the drain walls, and any chokes inside the drains?